
“端到端大模型”是一种人工智能模型架构,它的核心思想是:直接将原始数据作为输入,经过一个统一的模型处理后,直接输出最终结果,中间无需人工设计复杂的、分步骤的处理流程。
你可以把它想象成一位“全能专家”,它接收原始信息(如一张图片、一句话),然后直接给出最终答案(如“这是一只猫”、一个驾驶指令),而不是像传统方式那样,需要多个“ specialists”(专家)分工协作,一步步传递和处理信息。
与传统模式的对比
为了更好地理解,我们以自动驾驶为例来对比两种模式:
- 传统模块化模式: 像一个分工明确的流水线。
- 感知模块:先识别出图像中的“车道线”、“行人”、“交通灯”。
- 预测模块:再预测行人接下来会怎么走。
- 规划模块:根据以上信息,规划出一条安全的行驶路线。
- 控制模块:最后将路线转化为方向盘、油门、刹车的具体指令。
- 缺点:流程长,信息在模块间传递可能会有损失或延迟,且每个模块都可能出现误差并累积到下一步。
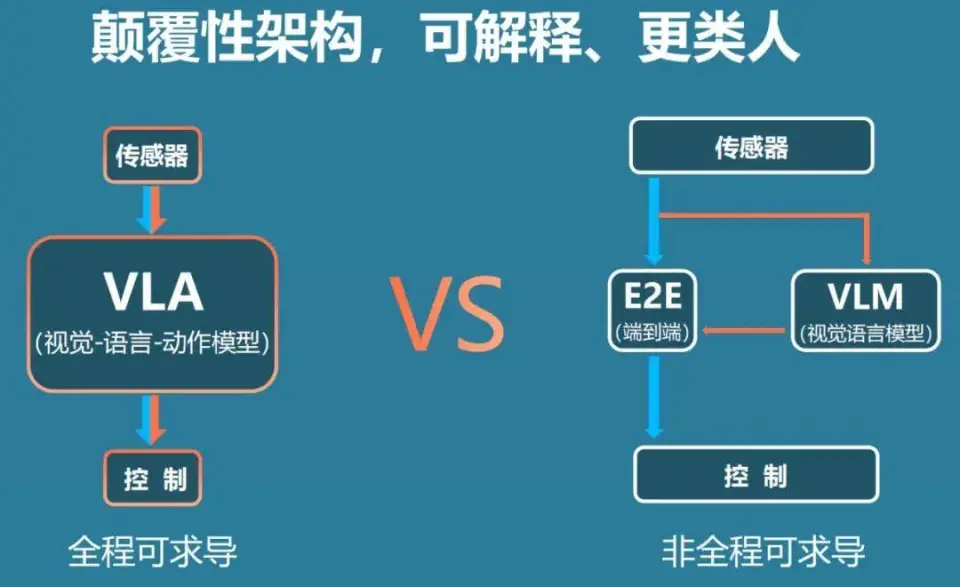
- 端到端模式: 像一个经验丰富的老司机。
- 输入:直接接收摄像头、雷达等传感器的原始数据。
- 处理:一个庞大的神经网络模型内部自行处理所有信息。
- 输出:直接输出最终的驾驶决策,比如“方向盘左转15度,减速”。
- 优点:流程一体化,能发现人类可能忽略的复杂关联,决策更高效,更像人类直觉。
主要优势
- 效率更高:消除了多个独立模块间的冗余和信息损耗,计算效率更高。
- 能力上限更高:模型能从海量数据中自主学习到更复杂、更精妙的模式,性能潜力巨大。
- 泛化能力更强:面对从未见过的“未知场景”时,能更好地做出决策,而不是因为某个模块失效而“卡壳”。
主要挑战:“黑盒”问题
端到端模型最大的挑战是其不可解释性,常被称为“黑盒”。
- 问题:我们很难知道模型内部究竟是如何思考并做出某个决策的。当它犯错时,也难以精准定位问题所在并进行修复。
- 影响:这在自动驾驶、医疗等对安全性要求极高的领域是一个重大隐患,因为无法保证系统的绝对可靠和安全下限。
在自动驾驶领域的应用
目前,端到端大模型是自动驾驶技术发展的热点方向。特斯拉、小鹏、理想、智己等车企以及轻舟智航等公司都在积极布局。
为了解决“黑盒”带来的安全问题,行业也在探索新的方案。例如,轻舟智航在2026年推出的“安全端到端大模型”,就尝试通过“安全对齐机制”和决策逻辑可视化,来增强模型的可解释性和安全性,让车辆的驾驶行为更可追溯、可验证。这代表了该技术从理论走向成熟应用的重要一步。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章


暂无评论...