
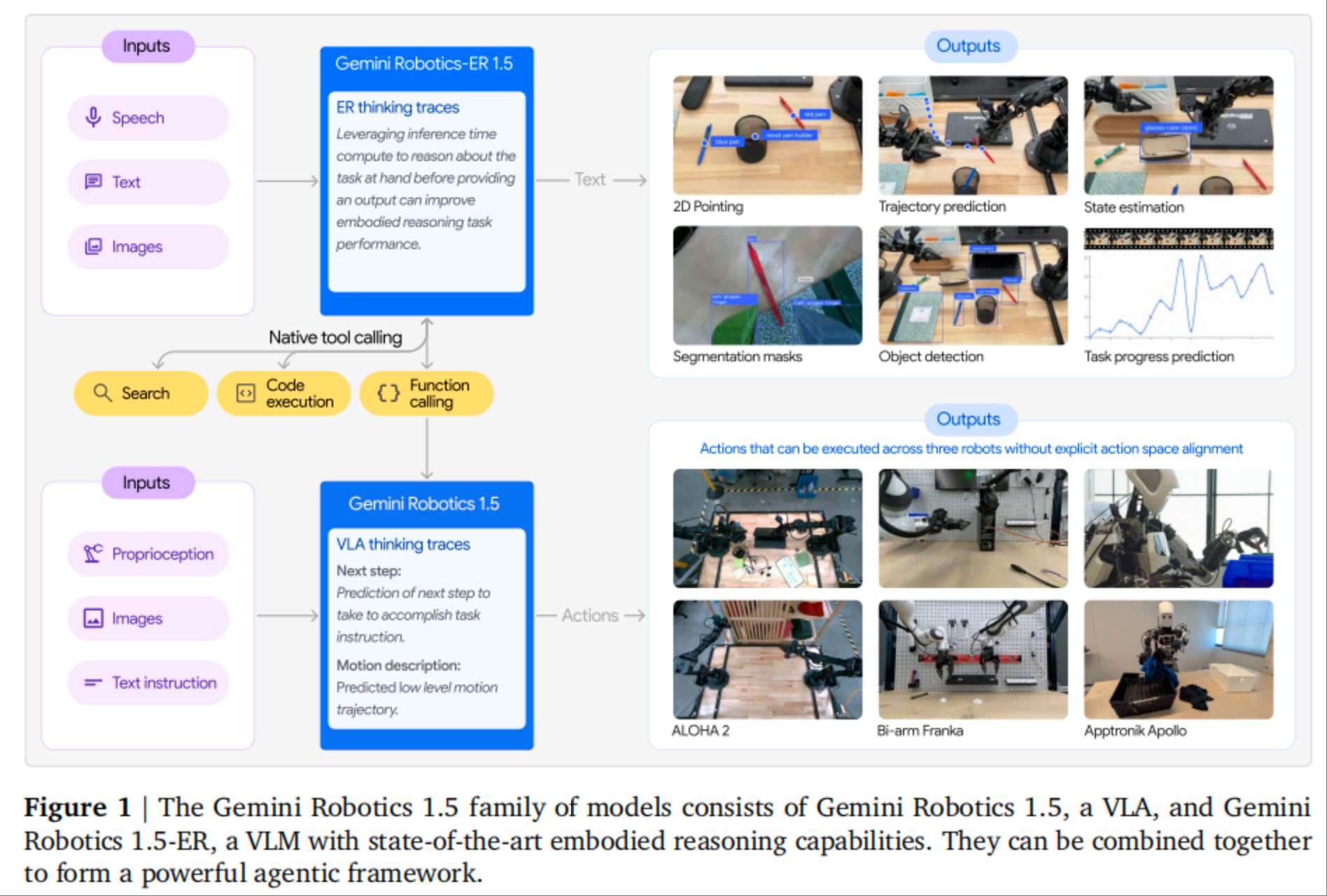
Gemini-Robotics-ER 1.5是谷歌DeepMind发布的专为具身推理(Embodied Reasoning)优化的视觉-语言模型(VLM),作为机器人的”高层大脑”,负责在物理环境中进行任务规划、逻辑决策与空间理解,而非直接控制机械动作。让机器人具备”先思考后行动”的类人认知能力,能通过自然语言推理分解复杂任务、调用外部工具并实时评估执行进度,从而解决传统机器人无法处理的多步骤动态场景问题。
Gemini-Robotics-ER 1.5核心特点
1. 具身推理能力
- 先思考再行动:在任务执行前生成自然语言形式的内部推理链,将复杂指令(如”按北京垃圾分类标准处理物品”)拆解为可操作的子步骤。
- 动态环境适应:能识别任务执行中的异常(如物体滑落),实时修正规划而非直接判定失败。
2. 跨场景泛化性能
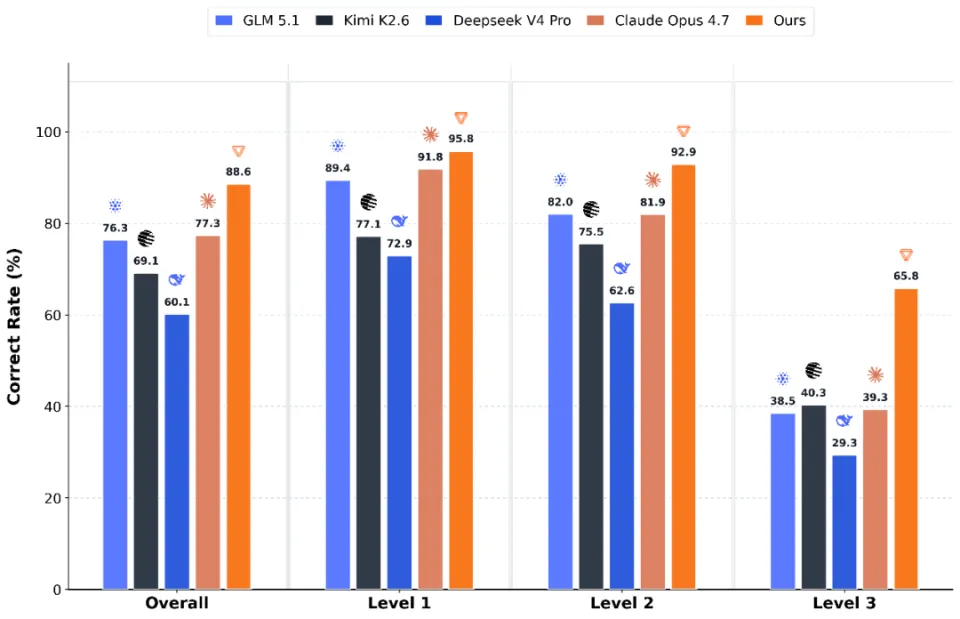
- 空间理解SOTA:在15项学术与内部基准测试中综合得分62.8分,显著优于第二名(60.6分),尤其在物体计数、多视角定位等任务上表现突出。
- 零样本工具调用:可直接调用谷歌搜索等外部工具获取实时信息(如查询目的地天气以调整行李打包方案)。
3. 安全与可解释性
- 语义安全过滤:能识别违反物理约束的指令(如”抓取超过20公斤的物体”),主动拒绝高风险操作。
- 决策过程透明化:通过自然语言解释行为逻辑(如”因检测到液体,跳过该物品抓取”),提升人机协作信任度。
Gemini-Robotics-ER 1.5技术原理
1. 分层推理架构
- 思维链机制:将任务拆解为感知→规划→执行→验证的闭环流程,例如处理垃圾分类时:
- 调用搜索工具获取当地规则;
- 识别物品属性(材质、状态);
- 规划抓取路径与投放顺序;
- 通过多视角图像验证任务完成度。
- 多模态对齐:融合视觉输入与语言指令,精准定位空间关系(如”左下角蓝色杯子”的坐标映射)。
2. 具身推理优化
- 物理常识嵌入:训练数据包含真实机器人操作轨迹与互联网图文知识,使模型理解重力、摩擦力等物理规律。
- 进度检测算法:通过多摄像头视角融合判断任务状态(如”笔是否完全放入笔筒”),避免因遮挡导致误判。
3. 协同执行框架
- 与VLA模型分工协作:作为”编排器”(Orchestrator),向执行层模型(Gemini Robotics 1.5)输出自然语言指令,后者将指令转化为具体动作。
- 动态思考预算:根据任务复杂度自动调整推理深度,简单任务快速响应,复杂任务延长规划时间以提升准确性。
Gemini-Robotics-ER 1.5核心功能
1. 复杂任务自主规划
- 多步骤任务分解:将”打包伦敦行李”拆解为”查天气→选衣物→放雨具”等子任务,无需人工分步指令。
- 规则动态适配:能根据地域差异自动调整行为(如北京与上海的垃圾分类标准差异)。
2. 环境交互增强
- 空间推理:精准定位物体相对位置(误差<1.5毫米),支持”指向指定区域”等精细指令。
- 成功检测:通过多视角图像实时验证任务完成度,避免传统模型”动作执行即结束”的缺陷。
3. 安全与工具集成
- 物理约束遵守:自动规避液体处理、超重搬运等危险操作。
- 外部工具调用:集成搜索API、自定义函数,扩展机器人知识边界(如查询实时天气、法规更新)。
Gemini-Robotics-ER 1.5适用人群
1. 机器人研发团队
- 快速部署复杂任务:利用其规划能力开发无需预设流程的通用机器人,减少针对单一任务的定制化开发。
- 安全系统构建:基于其语义安全过滤机制,设计更可靠的工业机器人防护策略。
2. 工业自动化开发者
- 动态场景适配:适用于非结构化环境(如家庭服务、仓储物流),处理物品位置偏移、突发干扰等现实问题。
- 跨硬件迁移:同一模型可适配Franka机械臂、Apollo人形机器人等不同平台,降低硬件适配成本。
3. 学术研究者
- 具身智能基准测试:作为空间推理与任务规划的SOTA基线,用于评估新算法性能。
- 人机协作研究:探索自然语言指令到物理动作的映射机制,优化人机交互逻辑。
4. 垂直领域应用方
- 医疗辅助:规划手术器械传递路径,自动规避无菌区域。
- 家庭服务机器人:理解模糊指令(如”收拾客厅”),自主判断物品归位逻辑。
Gemini-Robotics-ER 1.5的本质是将抽象认知转化为物理行动的”推理引擎”,其价值不仅在于技术性能,更在于推动机器人从”执行预设指令”向”理解任务意图”的范式转变。实际应用中需注意:该模型需与执行层模型(如Gemini Robotics 1.5)协同工作,且对动态环境的适应能力仍受限于训练数据覆盖范围。但对于需要处理多步骤、规则动态变化任务的场景,它已显著缩短了机器人从实验室走向真实世界的距离。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章

暂无评论...