
Qwen-Robot Suite是阿里巴巴于2026年6月16日发布的千问大模型家族首个完整具身智能模型系列,包含Qwen-RobotManip(操作模型)、Qwen-RobotNav(导航模型)和Qwen-RobotWorld(世界模型)三大核心组件,旨在为机器人提供从感知、决策到执行的通用技术底座,解决行业长期存在的模型碎片化问题。通过统一架构实现跨硬件平台的泛化能力,使机器人能基于自然语言指令在真实环境中自主完成复杂任务,无需为不同机型单独训练专属模型。
Qwen-Robot Suite核心定义与定位
1. 技术定位
- 具身智能通用底座:
首次将机器人操作、导航与物理规律预测能力整合为可协同调用的标准化模型套件,打破传统“一机一模型”的碎片化开发模式。 - 物理世界智能入口:
作为千问大模型从数字世界向物理世界延伸的关键载体,弥合语言指令与物理动作间的鸿沟,使机器人能直接理解自然语言并执行动作。
2. 模型分工
- Qwen-RobotManip:
作为视觉-语言-动作(VLA)模型,专注于精细操作任务(如拧水龙头、插网线),解决“手笨”问题。 - Qwen-RobotNav:
作为视觉-语言-导航(VLN)模型,实现复杂环境中的自主移动与目标搜索,解决“路痴”问题。 - Qwen-RobotWorld:
作为物理世界模型,通过预测符合物理规律的未来状态,为机器人提供“预判大脑”,保障操作合规性。
Qwen-Robot Suite核心优势
1. 跨平台泛化能力
- 统一动作表征体系:
采用80维标准化动作空间,将不同机器人硬件的操作逻辑转化为通用“肢体语言”,适配WidowX、Franka Panda等十余种机器人平台,新硬件部署仅需数步反馈即可自动适配。 - 开源数据训练突破:
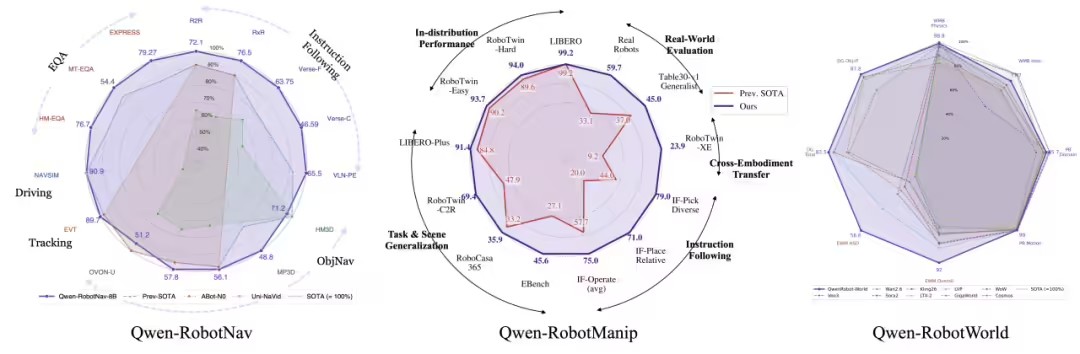
Qwen-RobotManip全程基于超3.8万小时开源数据训练,无需依赖私有采集数据,在RoboChallenge Table30 v1真机测评中以45%成功率排名第一,验证了数据普惠化的可行性。
2. 真实场景性能领先
- 操作精度提升:
在LIBERO单臂桌面操控任务中成功率达97.9%,接近专科模型水平;在双臂协作任务(如倒薯条)中,困难版本成功率87.2%,刷新行业纪录。 - 导航鲁棒性增强:
Qwen-RobotNav在陌生环境中实现零样本部署,宇树Go2四足机器人仅凭单摄像头即可完成跨房间寻物任务,推理延迟低至196毫秒。 - 物理规律合规性:
Qwen-RobotWorld在EWMBench等四大世界模型评测中物理合规性全满分,能精准预测物体运动轨迹,避免操作违反牛顿定律。
Qwen-Robot Suite技术原理
1. 统一架构设计
- 感知-行动闭环:
基于Qwen3.5视觉语言模型主干负责“看”和“理解”,结合扩散变换器(DiT)架构的动作解码器生成连续动作轨迹,弥合离散语言Token与连续动作的维度鸿沟。 - 具身感知提示机制:
通过自然语言描述机器人型号、臂型等参数,无需修改模型结构即可适配不同硬件,实现跨机型零成本迁移。
2. 关键技术创新
- 相对位置决策:
放弃传统依赖绝对坐标的计算方式,直接基于摄像头画面中的相对空间关系生成操作指令,环境变化时响应速度提升40%,任务完成率提高28%。 - 任务自适应观察机制:
Qwen-RobotNav能根据任务类型动态调整记忆策略(如开放空间用广角搜索,狭窄通道切局部优化),导航成功率提升至92%。 - 四阶段渐进式训练:
采用T2A→CPT→SFT→RL训练范式,逐步融合语言指令、视觉感知与动作控制,兼顾稳定性与泛化性。
Qwen-Robot Suite功能特点
1. 独立能力边界
- Qwen-RobotManip:
- 支持单臂/双臂精细操作(拧瓶盖、装配零件)。
- 分布外泛化能力突出:在ALOHA平台未知物体任务中成功率达76.9%,较从零训练模型提升近40个百分点。
- Qwen-RobotNav:
- 统一语言指令导航、目标搜索、自动驾驶等五大任务族至同一框架,复杂任务无需人工切换模型。
- 支持无预建图环境自主探索,可理解地铁线路图等视觉线索辅助导航。
- Qwen-RobotWorld:
- 以自然语言为接口预测跨操作、驾驶、导航场景的物理未来。
- 可生成仿真视频数据训练下游模型,缓解真实数据不足问题。
2. 协同工作模式
- 多模型联动:
例如执行“去厨房拿红色杯子”任务时,Qwen-RobotWorld规划路径→Qwen-RobotNav导航→Qwen-RobotManip抓取,形成“手眼脑”闭环。 - 智能体框架支持:
内部项目Qwen-RobotClaw允许上层智能体将三者作为工具调用,实现开放式任务执行与长程操作失败恢复。
Qwen-Robot Suite适用人群
1. 机器人研发企业
- 降低开发门槛:
无需为每款机器人单独训练模型,硬件厂商可直接调用标准化接口,将开发周期从数月缩短至数天。 - 加速商业化落地:
工业机械臂、物流AGV等设备可通过预集成模型快速实现复杂场景泛化能力,尤其适合非结构化环境作业。
2. 工业与服务场景
- 智能制造:
用于产线柔性装配、质检等任务,解决传统机器人难以适应小批量定制化生产的问题。 - 仓储物流:
配合Qwen-RobotNav实现动态路径规划,应对仓库环境变化(如临时障碍物),提升AGV调度效率。 - 家庭服务机器人:
通过Qwen-RobotWorld的物理预测能力,安全执行倒水、整理物品等需力学理解的任务。
3. 科研与生态伙伴
- 学术研究支持:
提供开源评测平台Chat2Robot,支持在浏览器中实时测试模型表现,推动具身智能标准化研究。 - 生态共建者:
阿里云开放部分接口供开发者扩展,百炼MaaS平台提供从训练到部署的全链路工具,适合算法优化与场景适配。
Qwen-Robot Suite的突破性在于将具身智能从“专科模型”推向“通用底座”:它不再要求机器人厂商为每个任务定制专属方案,而是通过统一架构实现能力复用。其基于开源数据的训练路径和跨硬件泛化能力,显著降低了真实场景落地的技术门槛。短期内,工业自动化与物流领域将率先受益;长期看,随着模型在复杂环境中的鲁棒性提升,家庭服务、医疗辅助等场景的规模化应用有望加速。当前关键挑战在于真实世界长尾问题的覆盖能力,但其模块化设计已为持续迭代提供了清晰路径。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...