
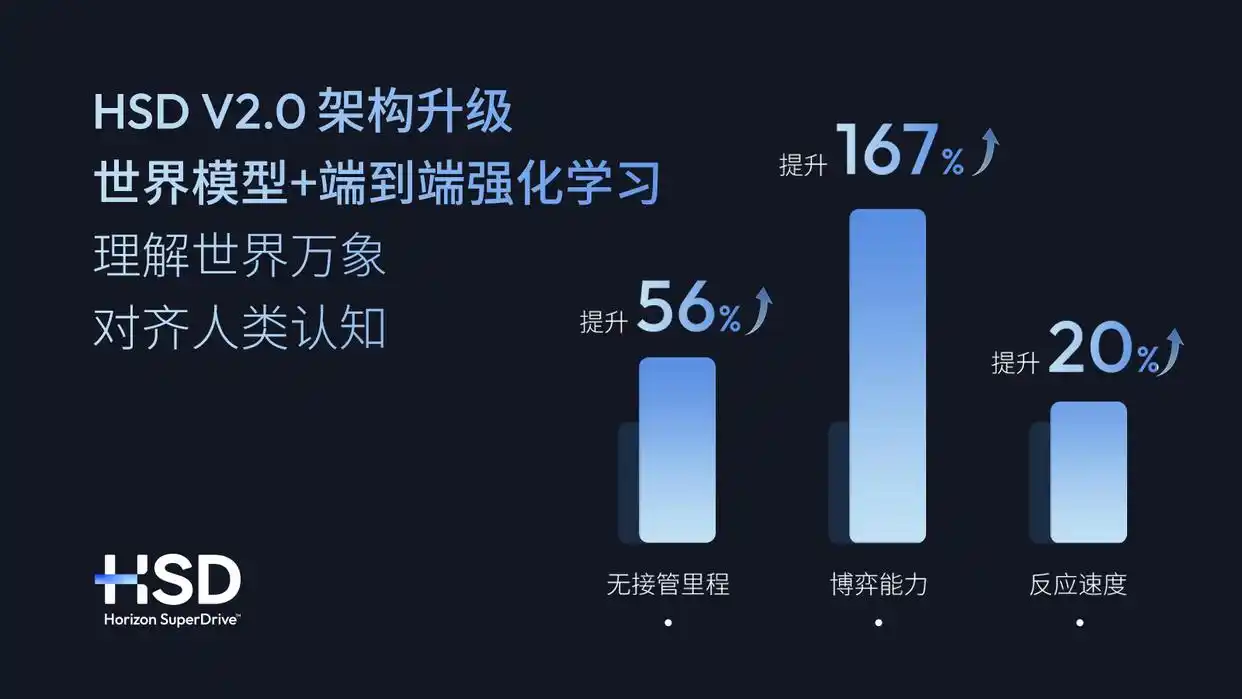
地平线HSD V2.0是地平线公司发布的全场景辅助驾驶系统重大OTA升级版本,通过“世界模型+端到端强化学习”双引擎架构重构系统底层逻辑,实现从被动响应到主动预判的能力跃迁。其无接管里程提升56%、博弈能力提升167%、反应速度提升20%,并首次将Occupancy Network(OCC)统一底座模型延伸至主动安全全场景,彻底摆脱传统“白名单”识别逻辑的局限。
地平线HSD V2.0核心特点
1. 主动预判式驾驶能力
- 世界模型驱动:系统在虚拟环境中自主模拟交通场景,提前预判行人意图、车辆轨迹等动态风险(如识别鬼探头前兆动作),而非仅依赖实时传感器数据被动响应。
- 强化学习闭环:通过真实道路专家数据+世界模型生成的合成数据持续迭代,对长尾场景(如施工区砂石路面)的自主决策能力显著增强。
2. 全场景统一技术底座
- OCC网络跨场景复用:将原用于NOA领航辅助的Occupancy Network(空间占用网络)扩展至AEB自动紧急制动、AES自动紧急转向等主动安全模块,实现感知-决策-执行全链路统一建模。
- 彻底摆脱“白名单”逻辑:不再依赖预设障碍物类型库,可动态解析异形障碍物(如散落货物、非标施工设备)的空间占用特征,风险识别范围扩大3倍以上。
3. 拟人化驾驶体验优化
- 博弈能力质变:在加塞、窄路会车等场景中,系统能模拟人类驾驶员的试探性交互策略(如小幅调整车速试探旁车意图),避免机械式急刹或过度保守。
- 横纵向深度耦合:转向与加减速控制由单一模型统一输出,点刹、重刹等不良操作减少超90%,过弯、绕行动作更连贯自然。
地平线HSD V2.0技术原理
1. 世界模型×强化学习双引擎
- 世界模型构建:基于真实道路数据训练物理仿真引擎,高保真还原车辆动力学、交通参与者行为规律,生成海量极端场景训练样本(如潮汐车道突变)。
- 强化学习闭环:系统在虚拟环境中自主探索交互策略,通过奖励函数筛选安全高效的决策路径,将经验反哺至实车模型,实现“自我进化”。
2. 一段式端到端架构升级
- 从光子到轨迹的直通链路:传感器原始数据直接输入单一神经网络,输出车辆控制指令,避免传统模块化架构中感知-规划-控制的多级延迟。
- 时延压缩至130纳秒级:系统从环境变化到动作响应的端到端时延比行业第二名快34%,红绿灯启停响应达毫秒级。
3. 统一安全底座模型
- OCC网络全域赋能:占用网络不再仅服务于NOA,而是覆盖AEB、AES等主动安全场景,通过统一的空间语义理解实现风险全局评估。
- 动态风险量化:系统实时计算障碍物碰撞概率、避让空间余量等参数,替代传统规则算法的阈值判断,决策更符合人类驾驶逻辑。
地平线HSD V2.0核心功能
1. 六大维度进化
- 模型升级:世界模型增强对物理空间、动态动作的推理能力,极端场景处理成功率提升40%。
- 行车升级:无接管里程提升56%,复杂分流岛选路自信度达98.7%。
- 安全升级:主动安全系统风险感知范围扩展至全目标、全方向、全时速,异形障碍物识别率超95%。
- 泊车升级:支持无图环境下的“有空就能泊”,窄车位泊车成功率提升至97%。
- SR升级:3A级实时环境渲染,HMI界面可直观展示系统对“鬼探头”的预判轨迹。
- 体验升级:25项交互细节优化,如拥堵路段加减速线性度提升50%,减少晕车感。
2. 关键场景突破
- 动态博弈场景:在连续Cut-in、施工区绕行等场景中,系统能主动试探安全空间,避免被动跟随前车。
- 无图自主决策:完全依赖传感器实时建图,在砂石路面、潮汐车道突变等无高精地图场景中自主规划路径。
- 漫游模式强化:城区/园区内无需设置目的地即可智能巡航,支持“绕圈等人”等拟人化行为。
地平线HSD V2.0应用场景
1. 城区高阶辅助驾驶
- 复杂路口通行:超宽无车道线路口、连续直角弯等场景中主动降速预判风险,选道执行更果断。
- 人车混行路段:对行人横穿、电动车突然切入等场景提前0.5秒预判轨迹,制动更平顺。
- 施工区应对:在无明显边界的临时道路中自主识别可通行区域,绕行路径更贴近人类驾驶习惯。
2. 高速与长途场景
- 博弈式变道:汇入车流时动态评估旁车反应,避免强行切入导致急刹。
- 拥堵跟车:加塞车辆切入时小幅调整车速试探空间,减少急刹频率80%以上。
- 匝道通行:上下匝道曲率适应性提升,过弯侧倾控制误差缩小至0.2°以内。
3. 主动安全全域覆盖
- AEB场景扩展:可识别锥桶阵列、非标警示牌等非常规障碍物,触发逻辑更符合实际风险。
- AES协同避让:紧急转向时同步计算周边车辆动态,避免转向后二次碰撞。
- AMAP误踩防护:对突发障碍物的响应中自动抑制油门误操作,响应速度提升20%。
地平线HSD V2.0适用人群
1. 核心受益用户
- 高频通勤者:城区拥堵路段接管频率降低至0.2次/百公里,显著缓解驾驶疲劳。
- 家庭用户:防御性驾驶策略主动规避盲区风险。
- 新手司机:拟人化控车逻辑减少机械感操作,避免重刹导致的晕车问题。
2. 需明确的能力边界
- 强依赖传感器输入:在暴雨、大雾等极端天气下,性能会随感知能力下降而收敛。
- 不替代驾驶员责任:系统设计为L2级辅助驾驶,驾驶员仍需全程监控路况。
- 长尾场景持续进化:对极端罕见场景(如道路塌陷)的处理依赖后续OTA迭代。
地平线HSD V2.0的本质是通过世界模型构建“驾驶先验知识库”,以强化学习驱动系统自主进化,将辅助驾驶从“功能堆砌”推向“能力涌现”。用统一技术底座打通行车、泊车、安全三大场景,使系统对复杂路况的应对逻辑更接近人类驾驶员的“条件反射”,而非规则库的机械匹配。对于用户而言,这意味着日常通勤中更少的接管焦虑、更自然的控车质感,但需理性认知其作为L2级系统的责任边界——技术再先进,安全驾驶的最终决策权始终在人类手中。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...